Autonomous driving in our digital factory
Implementing the autonomous functionality onto a mobile robot can be very challenging. To reduce the development time of the robot/software the use of digital twin is practically essential.
In our currently running research project ROSdriven, we are developing a physical AGV. To speed up our software development a digital twin of our robot has been created.


Digital twin – Gazebo
As a digital twin environment, we use Gazebo.
This software tool lets us simulate our robot, world, and our SENSORS! For example camera, lidar, depthcam, GPS, imu,…

The advantages of the digital twin are numerous:
- Rapid prototyping of the robot
- Use of a variety of simulated sensors
- Alter/test the environment parameters (light, dust, rain, sunlight,…)
- Extensively testing of the autonomous software
- …
Autonomous navigation
To implement the autonomous driving functionality we make use of the ROS navigation package.
In the figure below the needed building blocks for the navigation package are visualized.
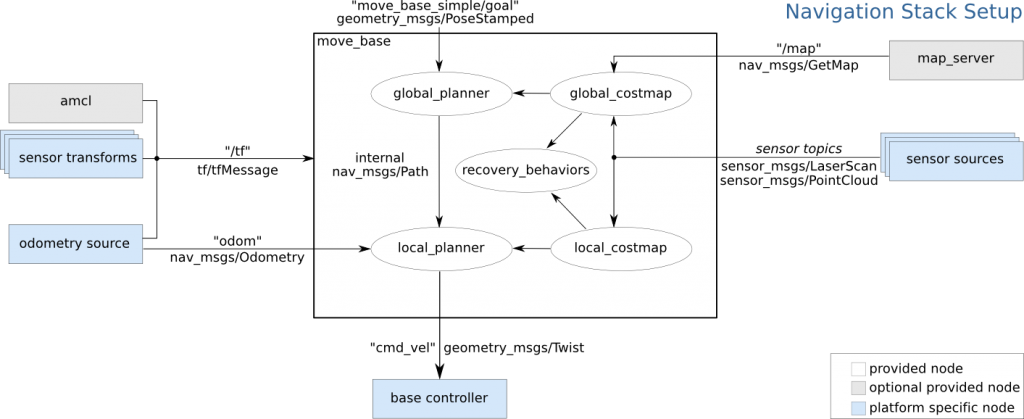
The navigation package needs odometry information, sensor information (Laserscan or Pointcloud), and an optional map of the environment.
In our case, the simulated robot is equipped with laserscan sensor and the navigation is based on a premade map with the use of gmapping.
When requesting a new location the navigation package will generate a dynamic path to the goal. When obstacles are detected the path will be changed so that the obstacle can be avoided.
Want to know more? Feel free to contact us.