Projectupdates
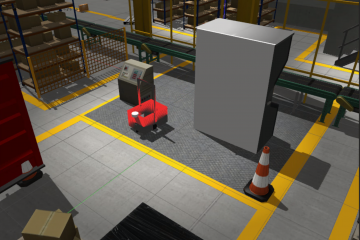
Autonomous driving in our digital factory
Implementing the autonomous functionality onto a mobile robot can be very challenging. To reduce the development time of the robot/software the use of digital twin is practically essential. In our currently running research project ROSdriven, we are developing a physical AGV. To speed up our software development a digital twin Read more…